Simulation Starten
Installation
Preparation
Als erstes müssen die ganzen Repositories in den ROS2_ws geladen werden.
cd /home/user/ros2_ws/src
Wir navigieren wieder in unseren Workspace (erfahrene haben vlt einen anderen Workspace oder einen anderen Benutzernamen als "ros", bitte entsprechend anpassen) und dann in den src Ordner.
git clone https://github.com/EduArt-Robotik/edu_robot.git &&
git clone https://github.com/EduArt-Robotik/edu_robot_control.git &&
git clone https://github.com/EduArt-Robotik/edu_simulation.git &&
git clone https://github.com/EduArt-Robotik/edu_virtual_joy.git
Alle nötigen Repositories klonen und bauen mit folgendem Befehl:
colcon build --symlink-install --packages-select edu_robot edu_robot_control edu_simulation --event-handlers console_direct+
Da laufen dann ein paar Minuten lang ganz viele Befehle durch die Kommandozeile.
Dann öffnen wir 4 Terminalfenster und geben erstmal in alle das hier ein:
source /home/user/ros2_ws/install/setup.bash
- wir müssen unseren workspace jedes Mal sourcen. Einer der Hauptfehler, wenn irgendwelche Pakete nicht gefunden werden oder irgendwas nicht geht. Clevere Menschen schreiben das direkt ins Startsktipt vom Dockercontainer …
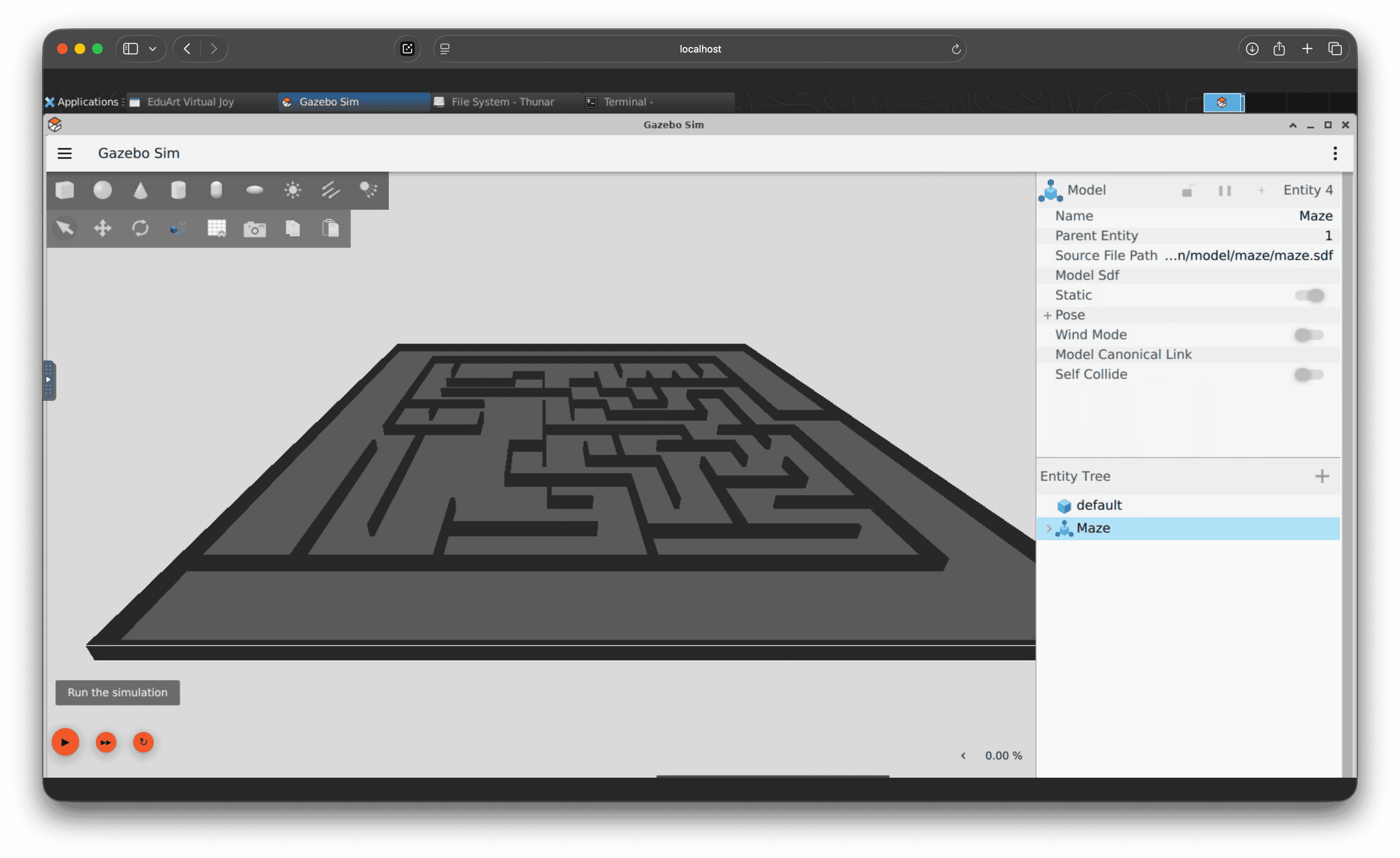
Terminal 1:
ros2 launch edu_simulation gazebo.launch.py world:=maze.world
- Startet die Gazebo Simulation
Terminal 2:
ros2 launch edu_simulation eduard.launch.py wheel_type:=mecanum pos_x:=0.0 pos_y:=0.0 pos_z:=0.04 yaw:=0.0 edu_robot_namespace:=eduard/blue
- Platziert einen blauen Eduard Roboter im Labyrinth
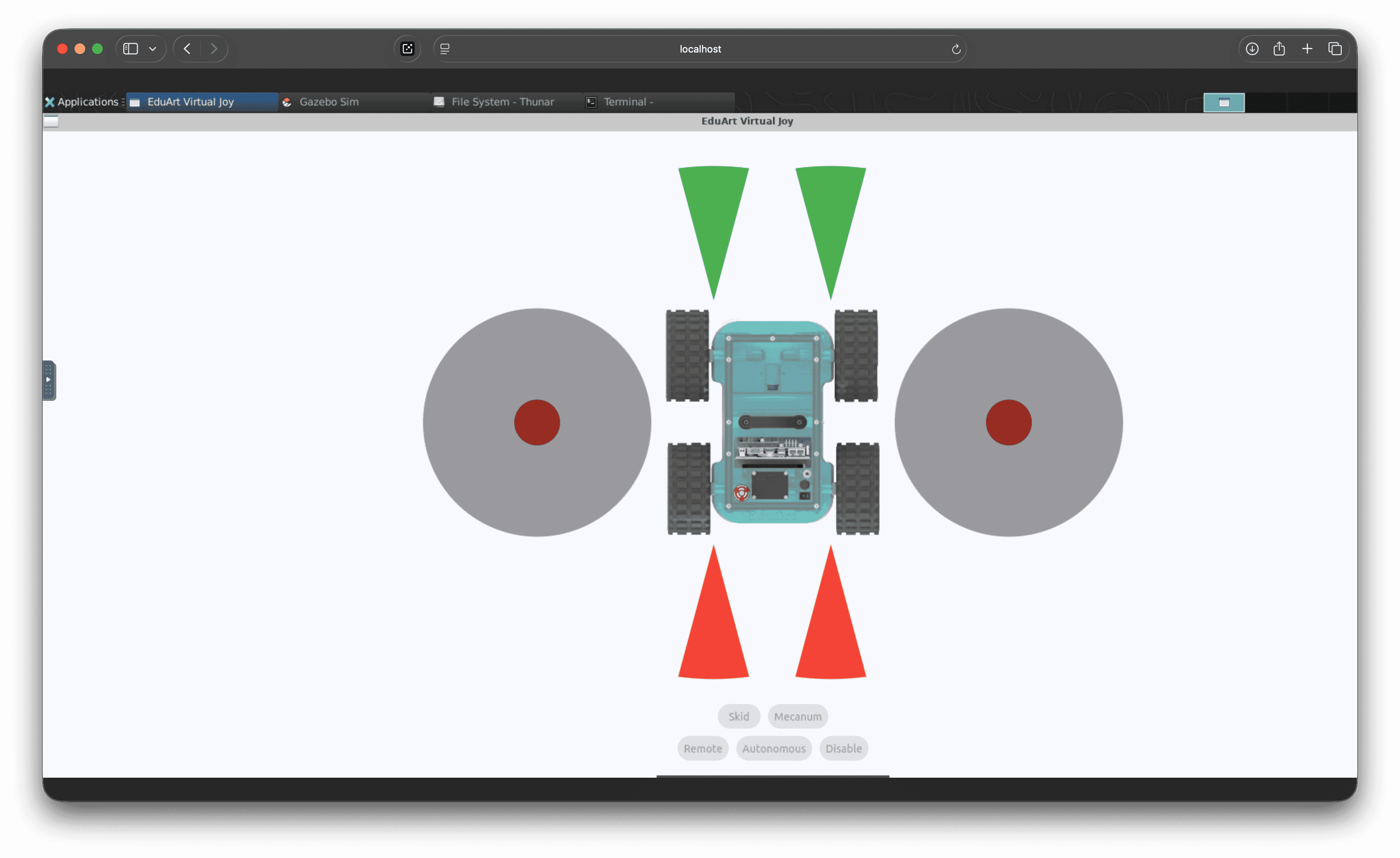
Terminal 3:
ros2 run edu_virtual_joy virtual_joy --ros-args -r __ns:=/eduard/blue
- Startet den Joystick
Terminal 4:
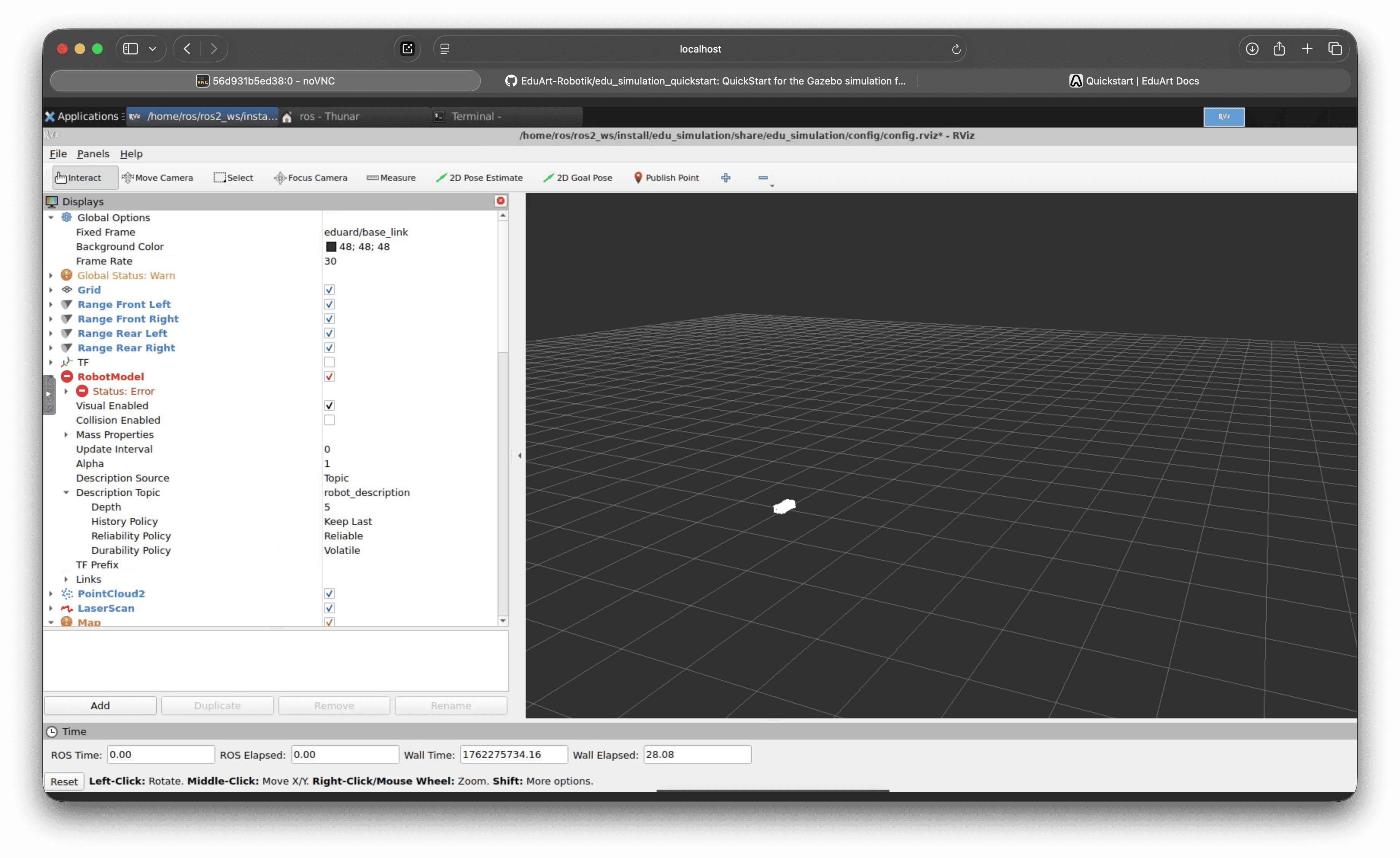
ros2 launch edu_simulation eduard_monitor.launch.py edu_robot_namespace:=eduard/blue
- Startet das Monitoring